
人體皮膚能夠在大面積表面上穩(wěn)定捕獲各類(lèi)多模態(tài)數(shù)據(jù),同時(shí)提供柔軟的接觸界面。盡管采用微機(jī)電系統(tǒng)(MEMS)的人工技術(shù)可模擬這些生物功能,但在制造工藝、軟剛性界面引發(fā)的分層問(wèn)題以及電子干擾等方面仍面臨諸多挑戰(zhàn)。為解決這些難題,英國(guó)劍橋大學(xué) Fumlya Iida 團(tuán)隊(duì)提出了一種以明膠為主要基材的的高靈敏度水凝膠膜,用做單層多模態(tài)傳感皮膚。借助電阻抗斷層掃描技術(shù),該傳感皮膚可實(shí)現(xiàn)多達(dá) 863,040 條跨膜傳導(dǎo)通路的信號(hào)采集,能夠識(shí)別至少六種不同類(lèi)型的多模態(tài)刺激,包括人體接觸、機(jī)械損傷、多點(diǎn)絕緣按壓及局部加熱等。
研究人員利用數(shù)據(jù)驅(qū)動(dòng)技術(shù),對(duì)這些通路產(chǎn)生的高度冗余且相互耦合的傳感信息進(jìn)行整合分析,篩選出需要重點(diǎn)監(jiān)測(cè)的通路,實(shí)現(xiàn)了高效的多模態(tài)感知。為了展示該方法的多功能性,他們將水凝膠鑄造成成人手掌的形狀和大小。借助信息結(jié)構(gòu)化策略,這款仿生手成功實(shí)現(xiàn)了環(huán)境條件預(yù)測(cè)、人體觸摸定位以及本體感覺(jué)數(shù)據(jù)生成等功能。該研究框架解決了多模態(tài)軟傳感領(lǐng)域中物理提取有效信息的技術(shù)挑戰(zhàn),為敏感系統(tǒng)中單層蒙皮的信息主導(dǎo)型設(shè)計(jì)開(kāi)辟了新方向
軟感皮膚的多模態(tài)信息結(jié)構(gòu)
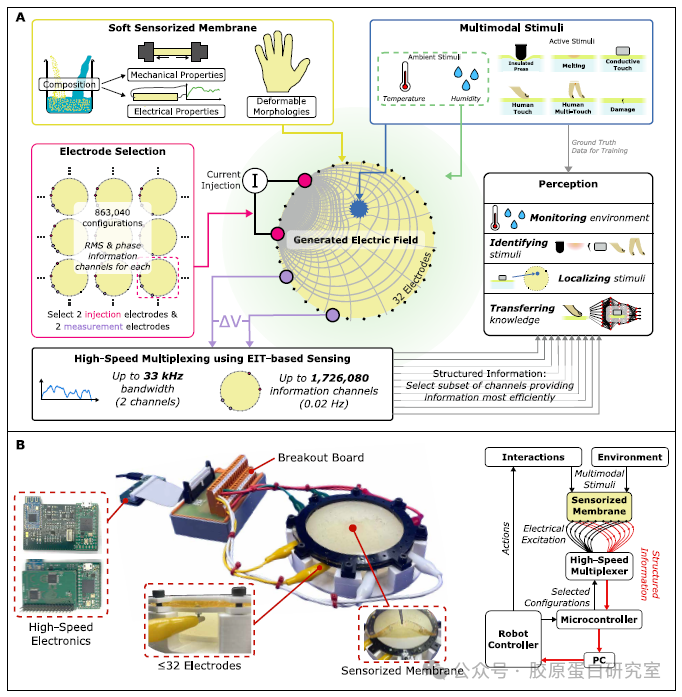
水凝膠膜的具體材料組成及配比為:明膠粉末、水、甘油、檸檬酸一水合物按 1 : 1.5 : 1.5 : 0.2 的質(zhì)量比混合,在 50 °C 的烤箱中均質(zhì)化 48 小時(shí),期間按明膠粉末與鹽1:0.1 的質(zhì)量比添加鹽。所得水凝膠具有低成本、可拉伸、壓阻應(yīng)變響應(yīng)等特性,能夠監(jiān)測(cè)環(huán)境溫度和濕度,其電學(xué)和機(jī)械性能可通過(guò)成分進(jìn)行調(diào)節(jié),以適應(yīng)特定應(yīng)用設(shè)計(jì)。為了監(jiān)測(cè)仿生皮膚的多模態(tài)相互作用,在其周邊安排了多個(gè)電極。將電極注入交流電以產(chǎn)生電場(chǎng)穿過(guò)膜,然后測(cè)量其他電極之間產(chǎn)生的電壓差。多模態(tài)刺激通過(guò)各種機(jī)制引起電場(chǎng)變化,這些變化被外周電極記錄下來(lái)。通過(guò)仔細(xì)選擇用于監(jiān)測(cè)皮膚的電極配置,系統(tǒng)的輸出信息可以被結(jié)構(gòu)化,以有效地返回模態(tài)和特定應(yīng)用的數(shù)據(jù)。
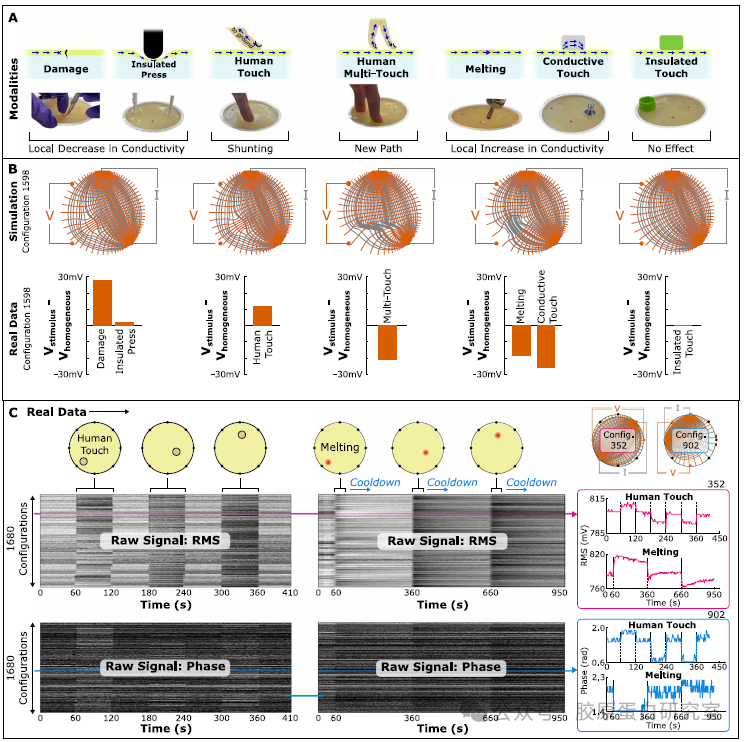
利用產(chǎn)生的電場(chǎng)檢測(cè)多模態(tài)刺激
通過(guò)數(shù)據(jù)驅(qū)動(dòng)方法優(yōu)化信息通道選擇,在單層水凝膠制成的 3D 手模型上實(shí)現(xiàn)多模態(tài)刺激預(yù)測(cè)(包括觸覺(jué)定位和環(huán)境監(jiān)測(cè))。在 3D 手模型上,即使刺激位置遠(yuǎn)離電極(如指尖),系統(tǒng)仍能通過(guò) 1726080 個(gè)信息通道檢測(cè)到原始觸覺(jué)響應(yīng)。這證明了高密度 EIT 技術(shù)在復(fù)雜形狀上的可行性。另外,通過(guò)訓(xùn)練神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)環(huán)境溫度與濕度,在觸覺(jué)實(shí)驗(yàn)中同步輸出高精度結(jié)果。經(jīng)多模態(tài)數(shù)據(jù)處理(觸覺(jué)與溫濕度同步)后,凸顯系統(tǒng)在真實(shí)場(chǎng)景的性能。
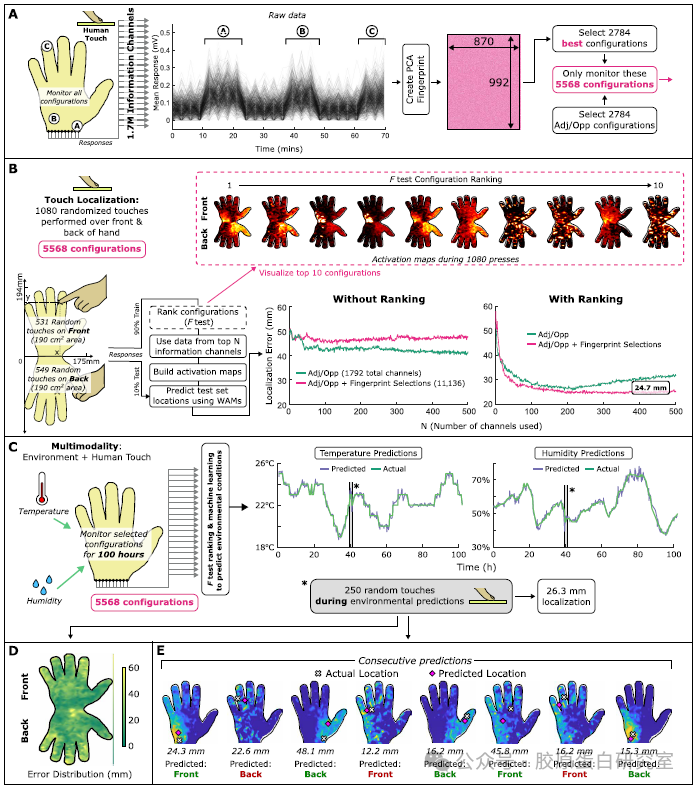
構(gòu)建信息以預(yù)測(cè)3D手部的多模態(tài)刺激
通過(guò)單層水凝膠皮膚和高密度 EIT,該研究提出了一種高效的多模態(tài)信息結(jié)構(gòu)化框架,解決了軟體機(jī)器人感知的核心挑戰(zhàn)。用數(shù)據(jù)驅(qū)動(dòng)的“信息導(dǎo)向設(shè)計(jì)”,避免了傳統(tǒng)傳感的制造復(fù)雜性,為軟體機(jī)器人、假肢和可穿戴設(shè)備開(kāi)辟了新路徑。
參考文獻(xiàn):
Hardman D, Thuruthel T G, Iida F. Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography[J]. Science Robotics, 2025, 10(103): eadq2303.
DOI: 10.1126/scirobotics.adq2303
人體皮膚能夠在大面積表面上穩(wěn)定捕獲各類(lèi)多模態(tài)數(shù)據(jù),同時(shí)提供柔軟的接觸界面。盡管采用微機(jī)電系統(tǒng)(MEMS)的人工技術(shù)可模擬這些生物功能,但在制造工藝、軟剛性界面引發(fā)的分層問(wèn)題以及電子干擾等方面仍面臨諸多挑戰(zhàn)。為解決這些難題,英國(guó)劍橋大學(xué) Fumlya Iida 團(tuán)隊(duì)提出了一種以明膠為主要基材的的高靈敏度水凝膠膜,用做單層多模態(tài)傳感皮膚。借助電阻抗斷層掃描技術(shù),該傳感皮膚可實(shí)現(xiàn)多達(dá) 863,040 條跨膜傳導(dǎo)通路的信號(hào)采集,能夠識(shí)別至少六種不同類(lèi)型的多模態(tài)刺激,包括人體接觸、機(jī)械損傷、多點(diǎn)絕緣按壓及局部加熱等。
研究人員利用數(shù)據(jù)驅(qū)動(dòng)技術(shù),對(duì)這些通路產(chǎn)生的高度冗余且相互耦合的傳感信息進(jìn)行整合分析,篩選出需要重點(diǎn)監(jiān)測(cè)的通路,實(shí)現(xiàn)了高效的多模態(tài)感知。為了展示該方法的多功能性,他們將水凝膠鑄造成成人手掌的形狀和大小。借助信息結(jié)構(gòu)化策略,這款仿生手成功實(shí)現(xiàn)了環(huán)境條件預(yù)測(cè)、人體觸摸定位以及本體感覺(jué)數(shù)據(jù)生成等功能。該研究框架解決了多模態(tài)軟傳感領(lǐng)域中物理提取有效信息的技術(shù)挑戰(zhàn),為敏感系統(tǒng)中單層蒙皮的信息主導(dǎo)型設(shè)計(jì)開(kāi)辟了新方向
軟感皮膚的多模態(tài)信息結(jié)構(gòu)
水凝膠膜的具體材料組成及配比為:明膠粉末、水、甘油、檸檬酸一水合物按 1 : 1.5 : 1.5 : 0.2 的質(zhì)量比混合,在 50 °C 的烤箱中均質(zhì)化 48 小時(shí),期間按明膠粉末與鹽1:0.1 的質(zhì)量比添加鹽。所得水凝膠具有低成本、可拉伸、壓阻應(yīng)變響應(yīng)等特性,能夠監(jiān)測(cè)環(huán)境溫度和濕度,其電學(xué)和機(jī)械性能可通過(guò)成分進(jìn)行調(diào)節(jié),以適應(yīng)特定應(yīng)用設(shè)計(jì)。為了監(jiān)測(cè)仿生皮膚的多模態(tài)相互作用,在其周邊安排了多個(gè)電極。將電極注入交流電以產(chǎn)生電場(chǎng)穿過(guò)膜,然后測(cè)量其他電極之間產(chǎn)生的電壓差。多模態(tài)刺激通過(guò)各種機(jī)制引起電場(chǎng)變化,這些變化被外周電極記錄下來(lái)。通過(guò)仔細(xì)選擇用于監(jiān)測(cè)皮膚的電極配置,系統(tǒng)的輸出信息可以被結(jié)構(gòu)化,以有效地返回模態(tài)和特定應(yīng)用的數(shù)據(jù)。
利用產(chǎn)生的電場(chǎng)檢測(cè)多模態(tài)刺激
通過(guò)數(shù)據(jù)驅(qū)動(dòng)方法優(yōu)化信息通道選擇,在單層水凝膠制成的 3D 手模型上實(shí)現(xiàn)多模態(tài)刺激預(yù)測(cè)(包括觸覺(jué)定位和環(huán)境監(jiān)測(cè))。在 3D 手模型上,即使刺激位置遠(yuǎn)離電極(如指尖),系統(tǒng)仍能通過(guò) 1726080 個(gè)信息通道檢測(cè)到原始觸覺(jué)響應(yīng)。這證明了高密度 EIT 技術(shù)在復(fù)雜形狀上的可行性。另外,通過(guò)訓(xùn)練神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)環(huán)境溫度與濕度,在觸覺(jué)實(shí)驗(yàn)中同步輸出高精度結(jié)果。經(jīng)多模態(tài)數(shù)據(jù)處理(觸覺(jué)與溫濕度同步)后,凸顯系統(tǒng)在真實(shí)場(chǎng)景的性能。
構(gòu)建信息以預(yù)測(cè)3D手部的多模態(tài)刺激
通過(guò)單層水凝膠皮膚和高密度 EIT,該研究提出了一種高效的多模態(tài)信息結(jié)構(gòu)化框架,解決了軟體機(jī)器人感知的核心挑戰(zhàn)。用數(shù)據(jù)驅(qū)動(dòng)的“信息導(dǎo)向設(shè)計(jì)”,避免了傳統(tǒng)傳感的制造復(fù)雜性,為軟體機(jī)器人、假肢和可穿戴設(shè)備開(kāi)辟了新路徑。
參考文獻(xiàn):
Hardman D, Thuruthel T G, Iida F. Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography[J]. Science Robotics, 2025, 10(103): eadq2303.
DOI: 10.1126/scirobotics.adq2303